Wasutorn Sanamchai (Bose), Nutpapon Limsupavanich (Kong)
supervisors: Tim Ziemer, Tina Vajsbaher, Holger Schultheis
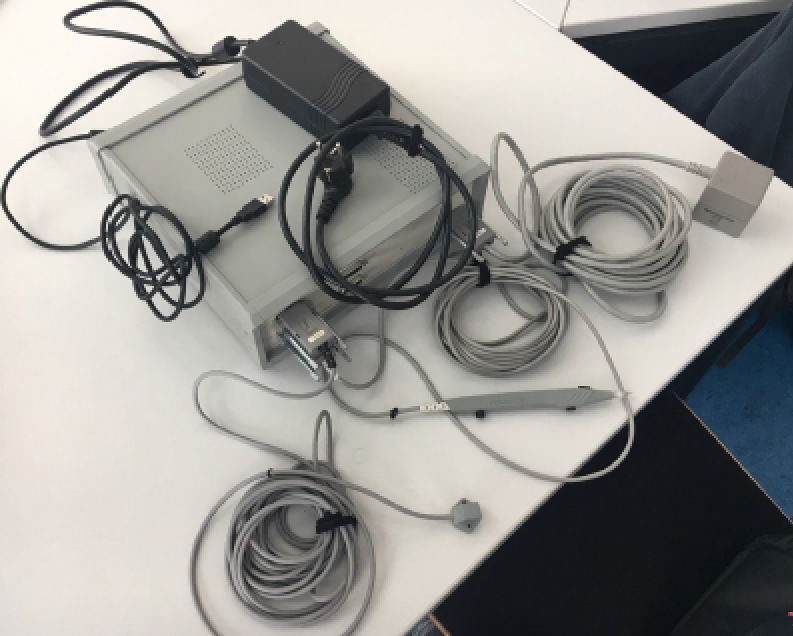
Polhemus Tracking System
I (Bose) am supervised by Tim Ziemer. Tim assigned me tasks to implement a software that can communicate with Polhemus Tracker machine or Polhemus Tracking system which is the machine that has sensors and provides the coordinates of the location of each sensor.
The set of tasks that I have done are:
1. Write a C++ program that can communicate with Polhemus Tracker system by using visual studio installed with PDI or Polhemus Device Integration software development kit.
2. I can send the data from this machine to another computer as UDP packet by using OSC or Open Sound Control protocol. This transmission method requires to implement a C++ program with oscpack library on the sender side and an OSC program (I’m using PureData) to collect the sent data on the receiver side.
3. I have created an interface to makes the C++ program communicating with Polhemus Tracker can be used easily.
4. I will continue the manual (documentation) after the presentation on the first of August finished.
 Polhemus Tracking System
Polhemus Tracking System
Laparoscopic Simulator
Kong was assigned to implement a laparoscopic simulator by his two supervisors, Tina Vajsbaher and Holger Schultheis. The laparoscopic simulator is a simulator that has the environment to make user use the spatial cognitive skill to do any action provided by the simulator. The timeline of the implementation consists of 4 phases:
- The First Phase Kong have implemented the rotated environment by using Java. This environment is created to let user to do an action on it through a computer screen.
- The Second Phase Kong have implemented a 2D laparoscopic simulator on Unity with C#. This simulator provides user a rotated screen and 3 mice (2 mice for left and right hand and a mouse for camera). It simulates the rotation and the action on a surgery through scope. When he finished 75% of the work, I have joined him. The tasks that we have completed comprise: 1. Stretching strings task on rotated screen (3 levels); 2. Bringing an object through maze; 3. Putting bacterias in a bin.
- The Third Phase Kong and I will have a meeting on this monday (10 July 2017) to talk about implementing a 3D laparoscopic simulator that is used with Polhemus Tracker system.
- The Fourth Phase When we finished the presentation, we will continue making a manual (documentation).